首页
关于我们
关于图为
企业文化
发展历程
荣誉资质
智研创新
产品中心
边缘计算机
Jetson AGX Orin
Jetson Orin NX
Jetson Orin Nano
Jetson AGX Xavier
Jetson Xavier NX
Jetson Nano
Jetson Thor
华为昇腾
地瓜机器人
摩尔线程
开发者套件
图为开发套件
官方套件
核心模块(SOC)
云边端服务器
大模型一体机
解决方案
智慧交通应用
智慧安防应用
机器人应用
其他场景应用
商用案例
新闻动态
公司新闻
行业新闻
资源中心
联系我们
简体中文
English
首页
关于我们
关于图为
企业文化
发展历程
荣誉资质
智研创新
产品中心
边缘计算机
Jetson AGX Orin
Jetson Orin NX
Jetson Orin Nano
Jetson AGX Xavier
Jetson Xavier NX
Jetson Nano
Jetson Thor
华为昇腾
地瓜机器人
摩尔线程
开发者套件
图为开发套件
官方套件
核心模块(SOC)
云边端服务器
大模型一体机
解决方案
智慧交通应用
智慧安防应用
机器人应用
其他场景应用
商用案例
新闻动态
公司新闻
行业新闻
资源中心
联系我们
English
/
简体中文
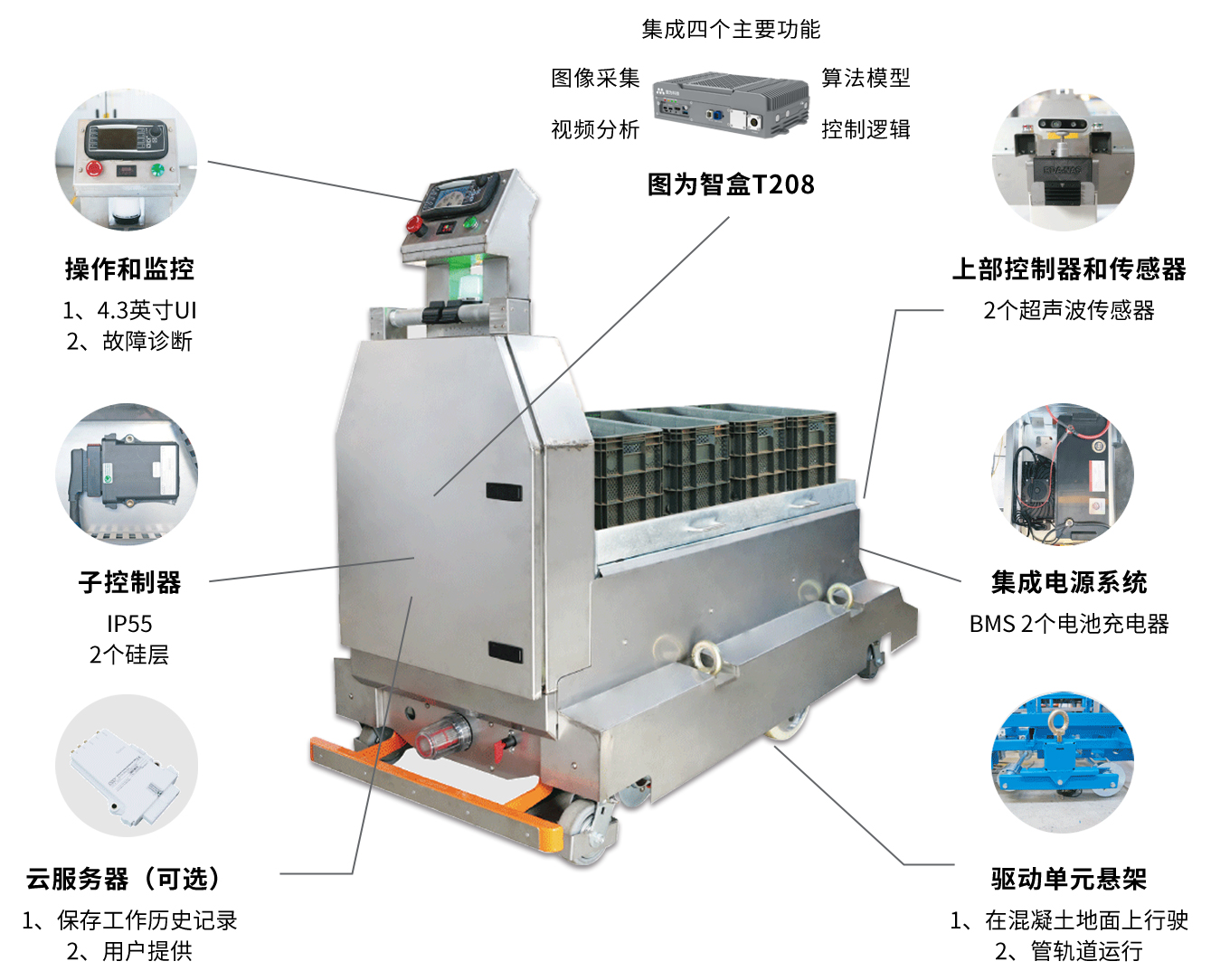
核心技术
多模态传感器融合
光学传感器
超声波雷达
高精度GNSS
AI视觉识别系统
基于Jetson AGX Xavier平台,
采用YOLOv5 农作物品类识别算法实现
成熟度检测,异常状态预警
自主导航系统
SLAM激光建图+VSLAM视觉导航
动态路径规划算法
多机协同调度系统
方案优势
自主运行
通过使用先进的光学传感器、摄像头和超声波
传感器,机器人能够实时感知周围环境,
并自主规划行驶路径。
精准定位
通过结合光学传感器和摄像头的数据,
机器人能够准确识别并定位农作物和收集点,
准确率高达99%以上。
高效运输
在收集农作物时,机器人能够自动规划最优路径,
确保在最短时间内将农作物运送到收集点,
实现了高效、快速的运输。
高效负载
机器人可连续不间断工作8小时以上;
最高负载力达300kg,
大大节省人力成本,提升农业生产效率。
搬运机器人解构图
应用场景
果蔬采摘后搬运
粮食作物转运
经济作物分级搬运
服务流程
电话咨询》
确立方案》
项目进行》
分析报告》
后续跟进